敏感材料如何助力人工智能?简述新材料在人工智能的应用
着李世石和柯洁在与谷歌AlphaGo的世纪之战中败下阵来,波士顿动力机器人Atlas的惊天一跳,人类自己一手打造的人工智能正一步步完成对自己的超越。过去20年间,人工智能从未停下发展的脚步,人们在可穿戴、可植入传感器和人体仿真等领域已经取得了显著进步,而支撑这些人工智能发展的背后有着材料、生物、电子等诸多领域的身影。

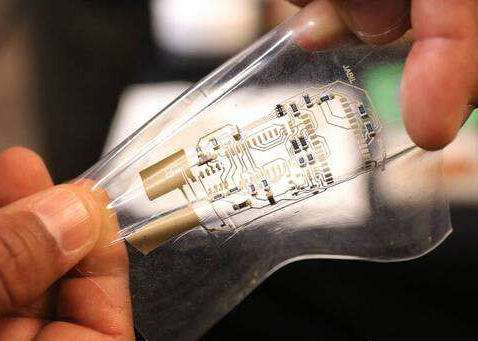
其中材料是构成传感器的核心部分,可以为人工智能提供关键性基础器件。新材料的快速发展,特别是柔性材料技术与柔性结构传感技术的发展,例如柔性电路、笔状可卷曲显示器和柔性压力监测鞋垫等的出现,大大提高了人工智能在人类生活中的应用。下面简单介绍几种新材料在人工智能领域的应用。
智能隐形眼镜
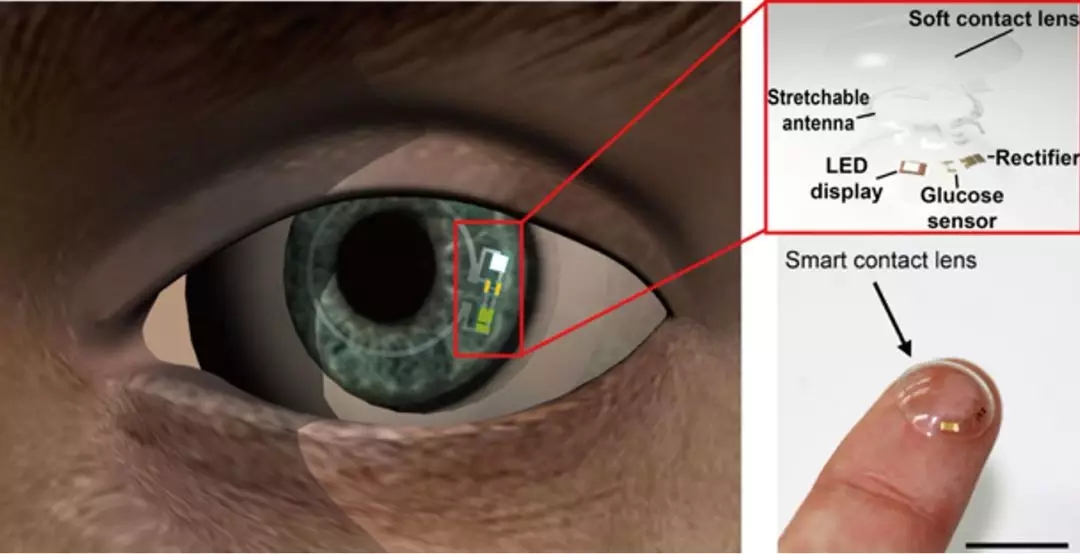
2014年,Google通过在类似塑料薄膜的柔性材料内部嵌入微型无线芯片和小型化的葡萄糖传感器,研发出了一款智能隐形眼镜用以帮助糖尿病患者更准确地检测血糖,为患者提供了一种简单方便、无痛的诊断和监护方式。2018年1月,韩国蔚山科技大学Jihun Park等在Science Advances报道了一种软性、可弯曲的智能隐形眼镜,该隐形眼镜通过石墨烯-葡萄糖酶传感器对血糖浓度进行实时监测,并通过系统无线显示部分(天线、整流器和LED显示)对变化中的血糖浓度做出反应。当血糖浓度过高时,通过关闭一个微小的嵌入式LED灯来给戴隐形镜者发出警示,消除了额外检测设备的需求。
仿真皮肤
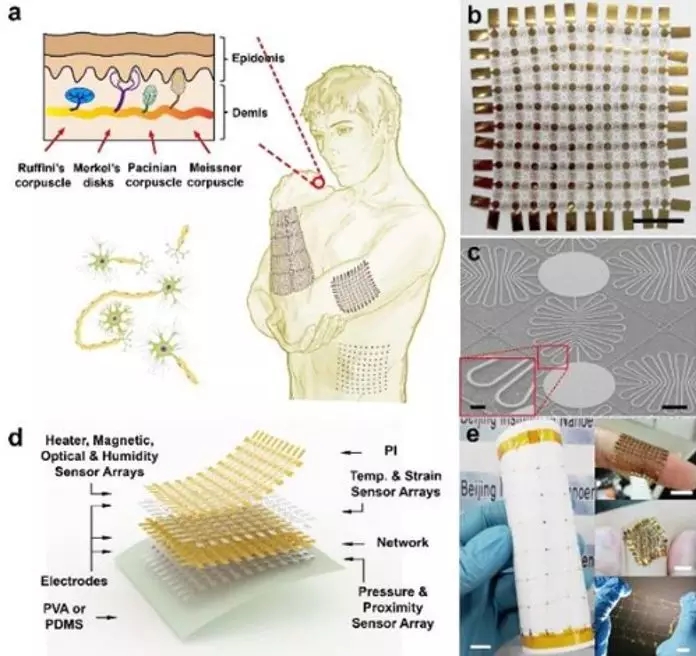
随着健康监测和人机交互的需求增加,高灵敏、多功能人造皮肤模拟人体皮肤的传感特性受到越来越多的关注。目前,电子皮肤大多是在柔性或弹性基底上制作具备探测压力、温度或其他刺激的传感器及阵列,通过感知周围环境中的多种物理、化学、生物等信号,形成有助于人机接口、智能机器人、仿生假肢等的智能化系统。2018年1月中国科学院北京纳米能源与系统研究所潘曹峰研究员、王中林院士等在Nature Communications报道了一种柔性可拉伸扩展的多功能集成传感器阵列,成功地将电子皮肤的探测能力扩展到7种,实现了温度、湿度、紫外光、磁、应变、压力和接近等多种外界刺激的实时同步监测。
电子鼻――气体传感器
电子鼻是通过模拟人类的嗅觉系统,通过气体传感器能在较低浓度下,连续、快速灵敏、实时地监测有毒有害气体,在环境监控、食品安全、医疗卫生等领域具有广泛的应用前景。近期,复旦大学化学系邓勇辉教授团队在Advanced Functional Materials报道了一步法直接共组装合成出一系列孔道高度连通、骨架高度晶化、铂纳米颗粒均匀负载的介孔WO3/Pt复合材料,其独特的结构和组分使其在较低的工作温度下(125 oC)对100ppm的CO具有高灵敏度响应(Rair/Rgas = 10),超快的响应/恢复时间(16 s/1 s)以及高度的选择性,明显优于无孔材料以及商业化的可燃气体传感器。
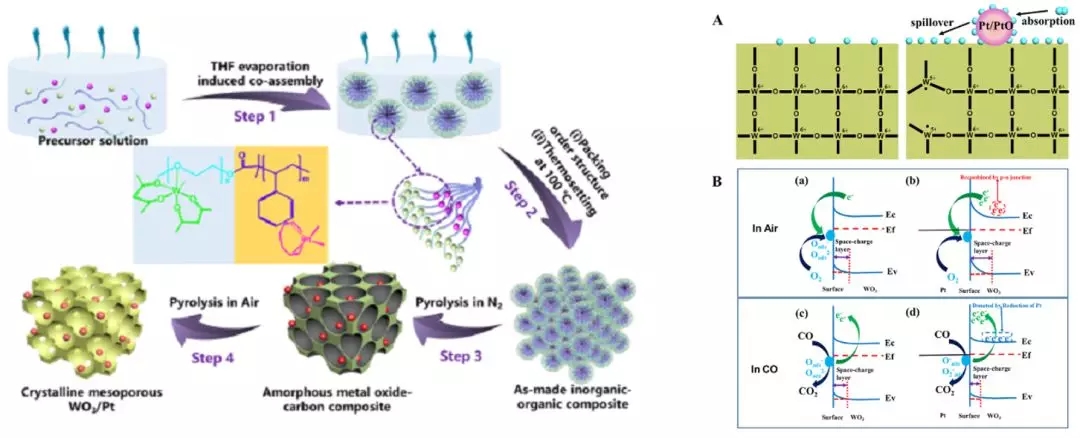
贵金属多孔材料合成示意图及催化机理图
仿真肌肉
仿人机器人因为具有类人的双足行走功能而具有很广阔的发展前景,但是目前的仿人机器人驱动仍然存在着柔性不足等缺点。2017年,美国哥伦比亚大学工程师通过在硅橡胶材料中引入微泡,并在微泡结构中加入乙醇的方式,研制出了一种可以用于人形机器人的合成肌肉。这种人造肌肉使用一根细电线和8 V低压电进行电刺激,让其升温到80 oC时,体积能够膨胀900%,使得低密度的硅橡胶满足了应力和应变的高要求。这种将材料的弹性特性和极端体积变化属性组合在一起的人造肌肉,通过计算机操控,几乎能够执行所有设计的动作任务。
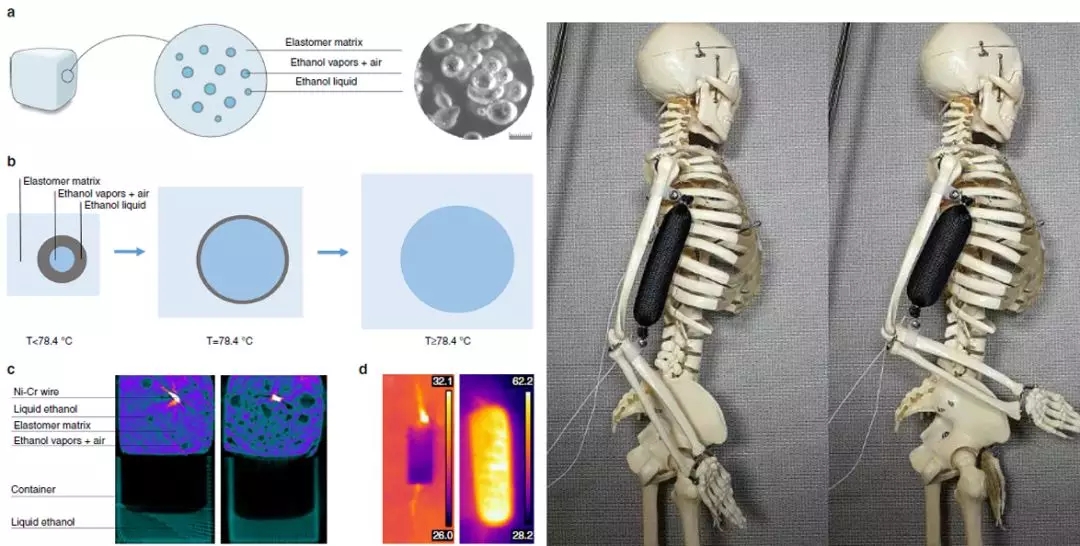
人造肌肉合成示意图及肌肉受刺激变化情况
柔性智能驱动
柔性智能驱动器是指将光、电、热、湿度等外部能量直接转化为器件本身的机械变形,包括弯曲、扭曲在内的多种变形形式,而无需通过繁琐的能量转化装置。简单结构、快速大变形、多刺激源响应以及能对飞行、跳跃等复杂生物运动进行模拟的柔性驱动器的研究受到越来越多的关注。2017年,合肥工业大学科研团队与中国科学院苏州纳米技术与纳米仿生研究所研究人员合作,采用碳纳米管制备了一种具有卷曲形状的驱动器。在不同的电压刺激下,驱动器可以实现从管状到平直形状的快速大变形,并可恢复到原始卷曲形状。这种新型柔性智能驱动器,不仅能模拟人类“弹指”的手部动作,还可以实现“跳跃+翻滚”运动,跳跃高度可达自身高度的5倍以上。
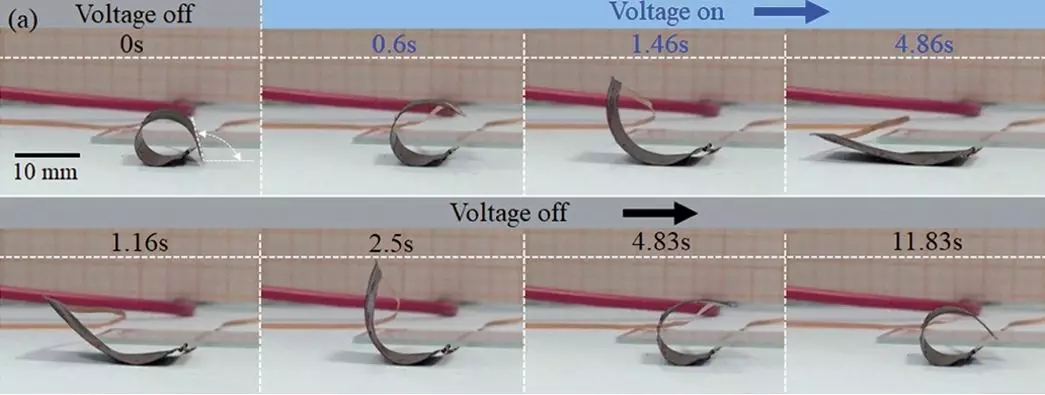
不同电压下柔性智能驱动器翻滚示意图

